
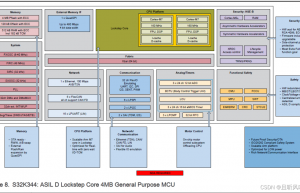
NXP的S32K系列MCU怎么样?
本文旨在通过博客记录学习恩智浦S32K344微控制器的过程,以便日后查找和巩固学习成果。由于相关资料较少,所以只能依赖官方文档进行学习。作为一个小白,如果有错误之处,欢迎大佬们指正。
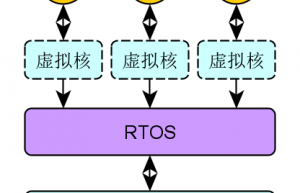
使用FreeRTOS要好好理解任务状态机
前面一篇文章介绍了如何利用FreeRTOS来进行点灯操作,这可以算是成功地运行了FreeRTOS。如果我们想要充分利用RTOS,从黑盒的角度去理解调度器是如何工作的就显得非常必要了。

Linux是实时系统还是分时操作系统?
我们经常分享的 µC/OS、FreeRTOS、RT-Thread、ThreadX 都是实时操作系统(RTOS),那么有读者问:什么是分时操作系统,Linux属于实时操作系统吗?


高手写的CAN总线入门总结
CAN总线最初由德国BOSCH公司开发设计,其最高速率可达到1Mbps。CAN总线因其强大的容错能力而备受青睐,在CAN控制器内置检错和处理机制的帮助下,能够减少传输出现错误的可能。

IIC驱动?C语言使用面向对象来实现
本文基于STM32和HAL库,使用面向对象的编程思想对IIC驱动进行封装,将IIC的属性和操作封装成一个库。在需要创建一个IIC设备时,只需实例化一个IIC对象即可。
详解串口通信232/485/422,入门必看!
计算机和终端之间的数据传输可以采用串行通信和并行通信两种方式。串行通信方式由于线路使用少、成本低,并且在远程传输时可以避免多条线路特性的不一致,因此被广泛采用。

.png)
