

本篇文章将讨论CAN总线和CAN协议,这两个名词往往经常被提到。CAN即是一种总线,同时也是一种协议。
CAN协议和CANOpen协议是两种不同的协议。通常而言,CAN协议属于硬件协议,而CANOpen协议则属于软件协议。
本文的主要目的在于介绍CAN网络,以帮助读者们更全面理解CAN总线协议,并更深入地了解底层CAN总线协议知识。
CAN网络
CAN网络可以被理解为多个CAN设备连接在同一条CAN总线上的网络构建。这些CAN设备被称为节点。下图展示了CAN网络的拓扑结构:
(这里可以插入相关图示)
在CAN网络中,节点们可以通过CAN总线相互通信和交换数据。CAN通信方式具有高可靠性与实时性的特点,非常适用于工业控制、汽车电子领域等。
CAN网络的拓扑结构可以采用许多不同的方案,包括星型、总线型、环形等各种拓扑形状。每种拓扑结构都具有其独特的优点与缺点,需要根据具体应用需求和系统设计选择适宜的拓扑结构。
下文将更深入地探讨CAN总线协议相关的知识,包括物理层、数据链路层、帧格式等内容,以帮助读者们更深入地了解CAN总线协议。
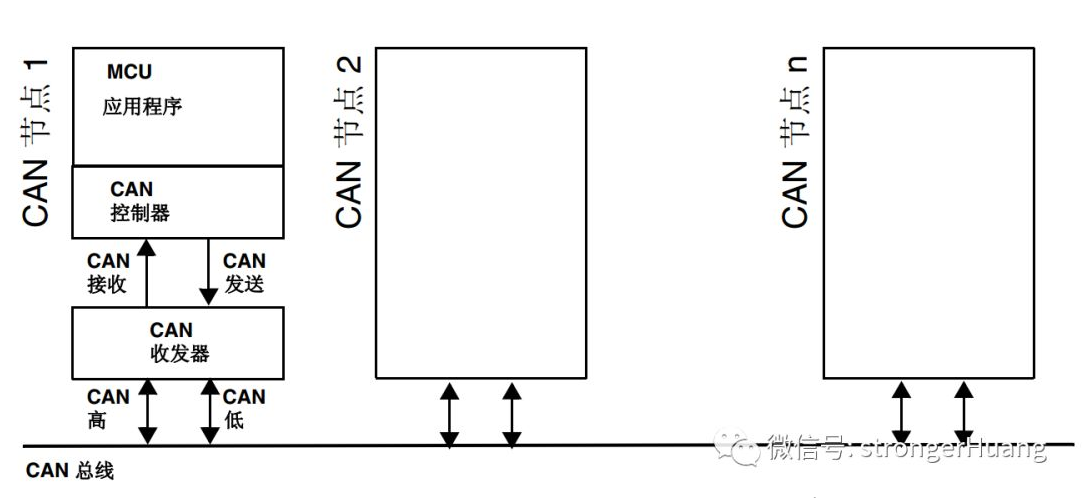
如上图,一个CAN节点主要包含三类:MCU应用程序、CAN控制器、CAN收发器。
1. MCU应用程序
MCU应用程序我将其分为三块:业务逻辑代码、协议层代码、底层驱动代码。
A.业务逻辑代码:是根据项目需求而定,也很好理解。比如我读取一个传感器数据,并对其做出相应逻辑处理。
B.协议层代码:比如后续要讲述的CANOpen。
C.底层驱动代码:配置CAN总线相应参数、控制收发的代码。
2.CAN控制器
CAN控制器内部结构还是挺复杂的,一般现在CAN控制器都是与处理器集成在一起。
其实对于编程的人来说,无非也就是包含一些控制、状态、配置等寄存器。
比如我们看到有些STM32芯片带有CAN,也就是说CAN控制器已经集成在STM32芯片中了,我们只需要编程操作其中的寄存器即可。
3.CAN收发器
CAN收发器:将CAN收发引脚(CAN_TX和CAN_RX)的TTL信号转换成CAN总线的电平信号。
PS:你可以把CAN总线通信认为是UART通过485进行通信:CAN控制器就如UART的控制器,而CAN收发器就如485转换芯片。
2ISO标准化的CAN协议
写这一章节的主要目的就是想让大家了解CAN总线位于OSI所在层次。
1.ISO/OSI基本参照模型

【注】
ISO:International Standardization Organization国际标准化组织;
OSI:Open Systems Interconnection开放式系统间互联;
2.CAN在OSI模型中的定义

【注】
LLC:Logical Link Control逻辑链路控制;
MAC:Medium Access Control媒介访问控制;
从上图可以知道CAN总线底层硬件的内容(CAN控制器、收发器)主要位于OSI的第1层和第2层。
3概述CAN总线协议
CAN总线协议:就是为了保证通信(收发)数据在CAN总线上能稳定传输而制订的一套协议。
CAN总线协议的内容很多,为方便初学者理解,本文先大概描述一下CAN总线协议,后续文章详细讲述CAN总线协议的内容。
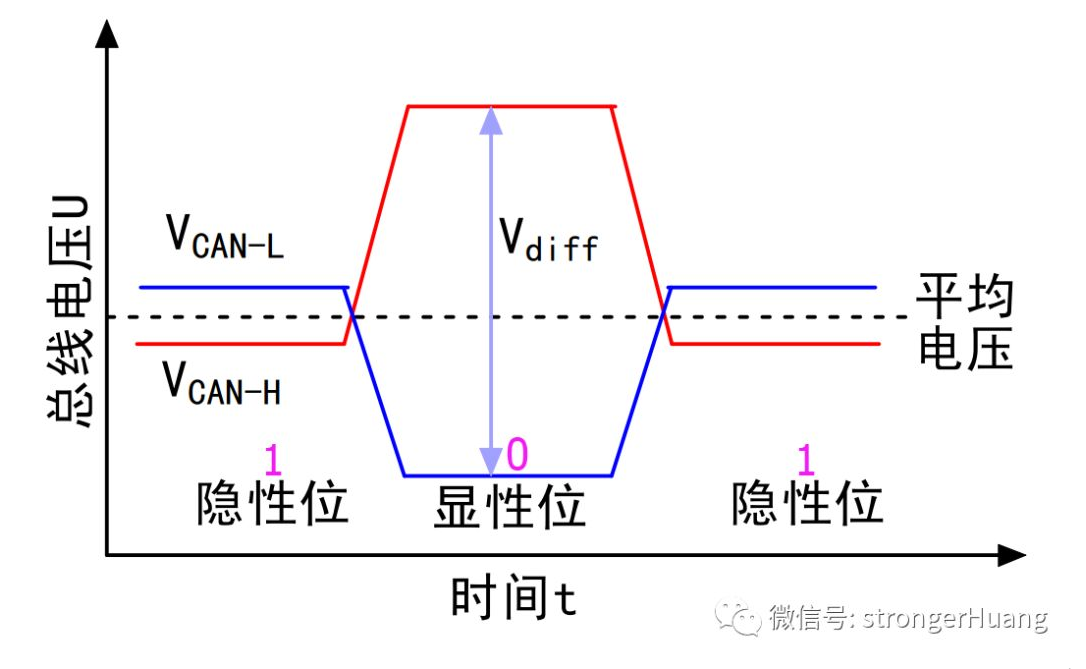
1.总线信号
CAN总线为「两线」「差分」信号,用隐形代表逻辑1,显性代表逻辑0。如下图:
2.优先级
假如某一时刻,一个设备(节点)往总线发0,一个设备往总线发1。那么总线会呈现什么现象?
答案:最后总线呈现为显性,也就是0。
3.位时序
位时序逻辑将监视串行总线,执行采样并调整采样点,在调整采样点时,需要在起始位边沿进行同步并后续的边沿进行再同步。
简单的说就是对一个bit位分几段进行采样,目的就是提高数据传输稳定性。在STM32中底层驱动代码就需要进行位时序编程,在STM32参考手册中也会发现如下位时序图:

4.帧的种类和格式
帧的种类有多种:
数据帧:用于发送单元向接收单元传送数据的帧。
遥控帧:用于接收单元向具有相同 ID 的发送单元请求数据的帧。
错误帧:用于当检测出错误时向其它单元通知错误的帧。
过载帧:用于接收单元通知其尚未做好接收准备的帧。
帧间隔:用于将数据帧及遥控帧与前面的帧分离开来的帧。
数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有11个位的标识符ID,扩展格式有29个位的ID。
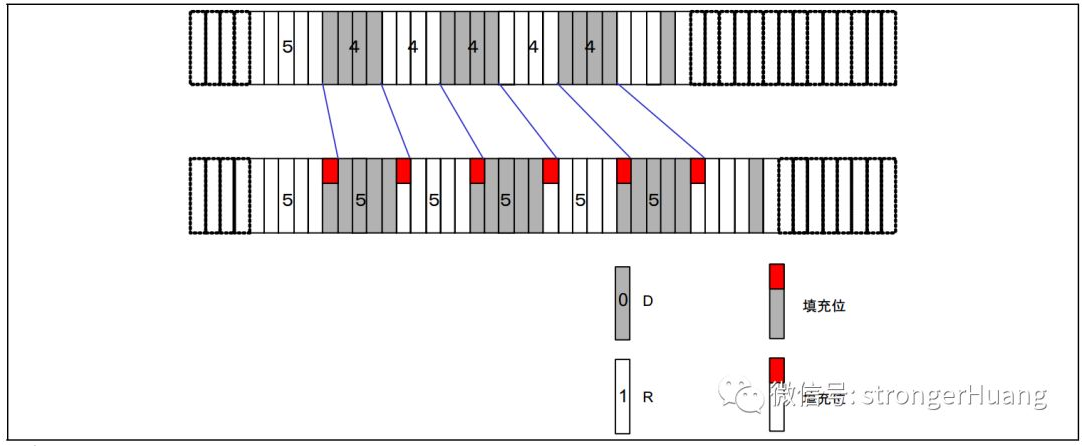
5.位填充
位填充是为防止突发错误而设定的功能。当同样的电平持续 5 位时则添加一个位的反型数据。如下图:
6.错误的种类

CAN总线协议内容很多,初学者可以先了解这些,希望对你有所帮助。
以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}