

CUBEMX是一个可视化的初始化配置工具,结合HAL库,为我们的开发带来了许多便利。然而,目前HAL库封装的延时函数只支持毫秒级别的延时。在日常开发中,我们经常需要微秒级别的延时,特别是在一些传感器数据读取的过程中,对时序要求非常严格,微秒级别的延时是必不可少的。基于这个需求,我们现在介绍三种实现微秒级延时的方法,这些方法同样适用于标准库。如果有不足之处,请各位大佬指正。
实验目标
-
使用普通定时器来实现微秒级延时 -
使用Systick功能实现微秒级延时 -
使用for循环实现微秒级延时
1、普通定时器实现微秒级延时
我们将使用定时器TIM2来实现微秒级延时,使用CUBEMX对项目进行配置。时钟是MCU的心脏,因此我们首先需要对时钟进行配置。
1.1、选择外部时钟
你也可以选择内部RC高速时钟,但在这里我们主要介绍使用外部高速时钟。如下图所示:
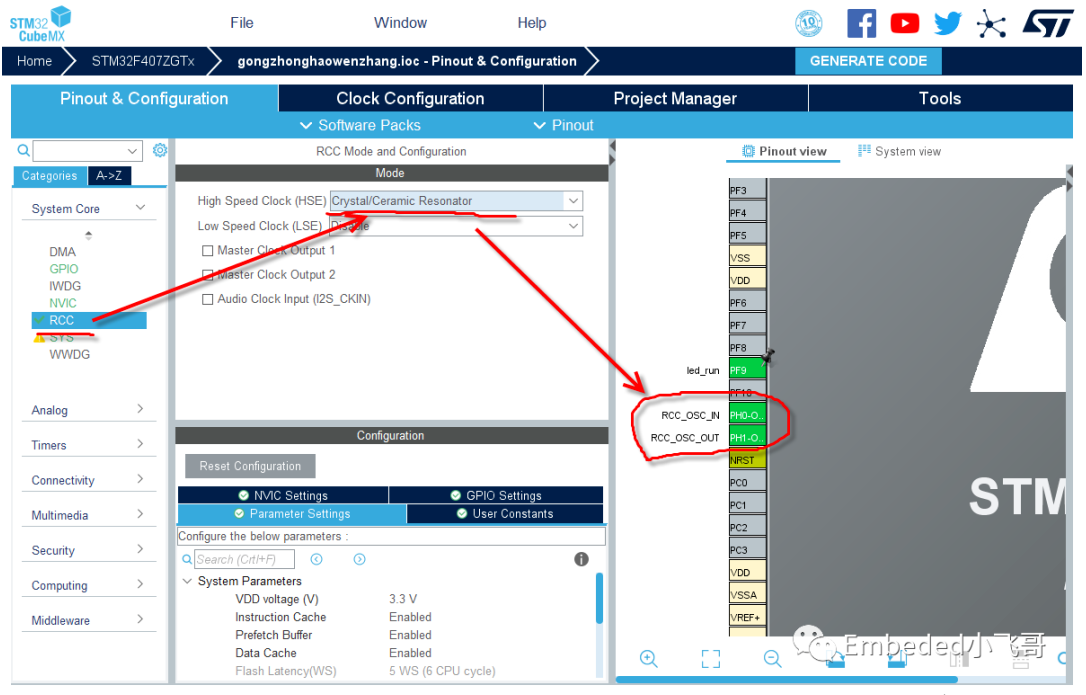
我板子上焊接的是 8M 的晶体,如果小伙伴们的板子上不是 8M,根据自己的晶振频率配置即可,左侧圈 1 中,可以根据自己的晶体频率,输入相应的频率,经过分频、倍频后,系统时钟频率设置为最大,168MHZ,APB1 的时钟频率为 84MHZ,也是后面用到的 TIM2 挂载的时钟源的频率。

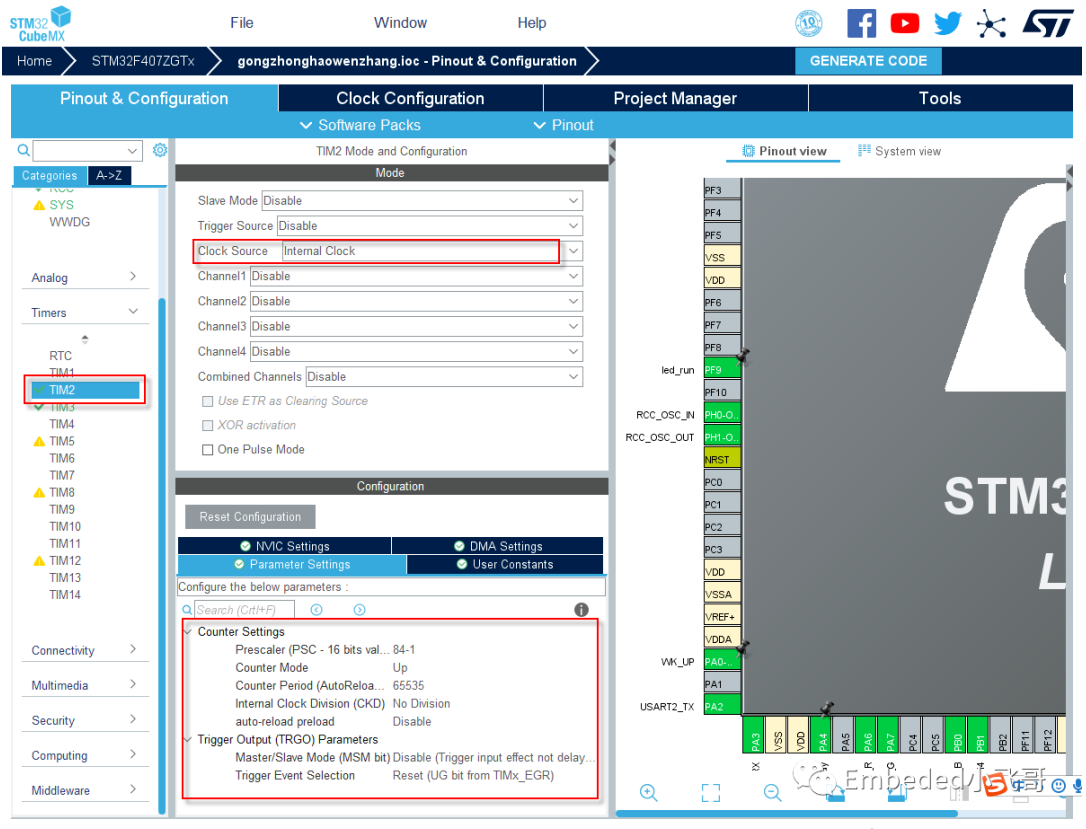
1.2、TIM2 基础配置
这个就比较简单了,分频系数 83,计数单位为 84MHZ/84 = 1uS,向上计数方式,周期 65535,由于没有使用到中断,不需要开启中断。
时钟及定时器的配置就完成了,下面是 cubemx 生成工程时的几项设置,建议大家勾选。首先是 HAL 库是否需要包含所有的文件,我们选择只需要用到的文件,这样可以缩短工程编译时间,只编译我们用到的库文件,接着是勾选为每个外设生成单独的.c .h 文件,这个建议一定要勾选,会使代码结构非常清晰,第三点就非常的重要了,用过 cubemx 的小伙伴是否遇到过每次重新生成工程后,之前添加的文件都不见了,这一项勾选之后,会保留用户文件。

然后是编译器选择,可以根据自己喜欢的 IDE 选择,我选择的是 KEIL5。

至此,配置工作就完成了,生成工程就可以了。
1.3、代码实现
/*
普通定时器实现us延时
*/
void user_delaynus_tim(uint32_t nus)
{
uint16_t differ = 0xffff-nus-5;
//设置定时器2的技术初始值
__HAL_TIM_SetCounter(&htim2,differ);
//开启定时器
HAL_TIM_Base_Start(&htim2);
while( differfor(i=0;i1.4、实现效果
通过延时翻转 IO,逻辑分析仪测试延时时间,分别测试了延时 20us,500ms,下面是测量图:


2、Systick 功能实现 us 延时
2.1、Systick介绍
CM3与CM4包含一个系统计数器SysTick,是一个24位倒计数定时器,当计数到0 时,将从RELOAD寄存器中自动重装载定时初值,只要把它在SysTick->CTRL中的使能位清除,则一直存在。寄存器介绍:

相应代码在core_cm4.h中
/**
\brief Structure type to access the System Timer (SysTick).
*/
typedef struct
{
__IOM uint32_t CTRL; /*!SysTick控制及状态寄存器(0xE000_E010): 该寄存器第0位:表示SysTick使能位,0表示关;1表示开;SysTick_CTRL_ENABLE_Mask;第1位:表示SysTIck中断使能位,0-表示关闭中断;1-打开中断;SysTick_CTRL_TICKINT_Mask
第2位:表示时钟源选择位,0,表示HCLK/8;1表示HCLK作为时钟源;SysTick_CTRL_SOURCE_Mask;
第16位:表示计数比较标志,如果上次读取本寄存器,计算到了0,则该位置1,如果读取该位,该位将自动清零。SysTick的LOAD寄存器:为递减计数,是24位寄存器,最大值为0xFFFFFF;SysTick的VAL寄存器:24位寄存器,读取时返回当前计数值,写它则使其清零,同时会清零CTRL寄存器中的COUNTFLAG标志。
2.2、代码实现
/*
Systick功能实现us延时,参数SYSCLK为系统时钟
*/
uint32_t fac_us;
void HAL_Delay_us_init(uint8_t SYSCLK)
{
fac_us=SYSCLK;
}
void HAL_Delay_us(uint32_t nus)
{
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
uint32_t reload=SysTick->LOAD;
ticks=nus*fac_us;
told=SysTick->VAL;
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnowelse tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;
}
};
}
2.3 实现效果
通过延时翻转IO,逻辑分析仪测试延时时间,测试了延时 20us,下面是测量图:

for循环实现us延时
这个方法比较接地气,采用NOP空语句实现,具体实现起来最好是看汇编代码,有兴趣的小伙伴可以研究研究,直接上代码:
/*
for循环实现延时us
*/
void for_delay_us(uint32_t nus)
{
uint32_t Delay = nus * 168/4;
do
{
__NOP();
}
while (Delay --);
}
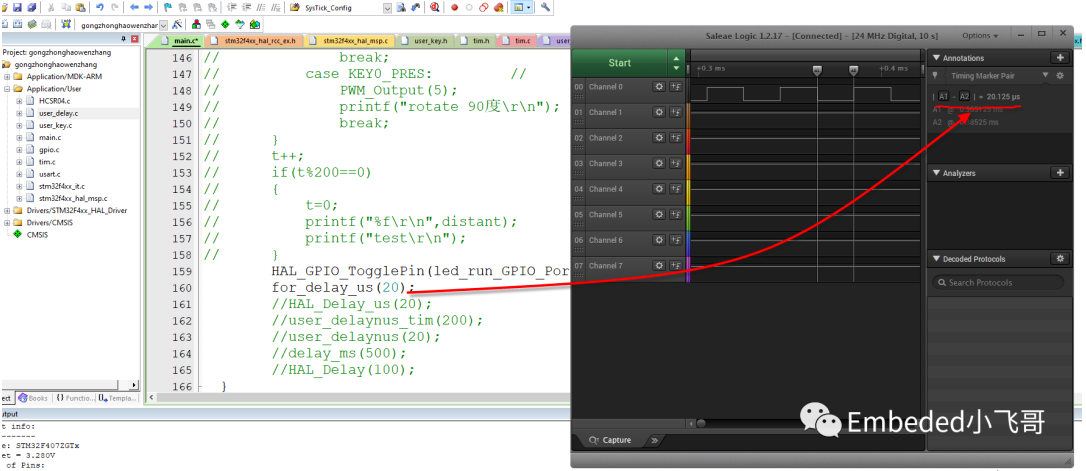
实现效果:通过延时翻转IO,逻辑分析仪测试延时时间,测试了延时 20us,下面是测量图:
本次要分享的内容就要结束啦,希望对us延时有疑惑的小伙伴有帮助,实现方法不止这些,暂时就分享这3种。
以上就是良许教程网为各位朋友分享的Linu系统相关内容。想要了解更多Linux相关知识记得关注公众号“良许Linux”,或扫描下方二维码进行关注,更多干货等着你 !

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

.png)

.jpg){kind=link}